
عوامل کلیدی برای ضبط و تشخیص پلاک
پنجشنبه، ۱ آذر ۱۴۰۳
اگر از دوربین تخصصی LPC بهره نمیبرید، نورپردازی، نصب و تنظیم دوربین نیاز به ویژگیهای منحصربفردی دارد، برخی از مهمترین توصیهها عبارتند از:
1. در شب از نور مصنوعی (IR مادون قرمز) بهره ببرید، این نور برای چشم قابل دیدن نیست و رانندگان را از نظر بینایی تحت تأثیر قرار نمیدهد.
2. در صورتی که به منبع نوری خارجی نیاز دارید، آن را تا حد امکان نزدیک به دوربین قرار دهید، این به این دلیل است که پلاکها نور را بهطور مستقیم به سمت منبع آن بازتاب میکنند.
3. زاویه بین دوربین و مسیر حرکت خودرو را به حداقل برسانید؛ توصیه میشود که زاویه کلی کمتر از 30 درجه باشد.
4. دوربین را به گونهای تنظیم کنید که بتواند پلاکها را در فاصلهای مناسب برای خودروهای مورد نظر ثبت کند، سرعتهای بالاتر نیاز به فاصله بیشتری برای ثبت تصویر دارند و در غیر این صورت ممکن است سیستم زمان کافی برای خواندن آن را نداشته باشد.
5. برای جلوگیری از تاری حرکت، باید حداکثر زمان شاتر را محدود کنید. زمان شاتر پیشنهادی به تراز دوربین و همچنین سرعت وسیله نقلیه بستگی دارد.
6. بهرهبرداری از دوربین را به گونهای تنظیم کنید که از نوردهی بیش از حد پلاک جلوگیری شود.
پس زمینه
تشخیص پلاک خودرو (LPR) کاربردهای متعددی از جمله کنترل دسترسی، مدیریت پارکینگ و دریافت عوارض سرعت بالا در بزرگراهها دارد. این فناوری از اواسط دهه 1970 در دسترس بوده و تا چندی پیش، تنها در سیستمهای بزرگ و پرهزینه مورد استفاده قرار میگرفت. اما با پیشرفت سریع دوربینهای شبکه، سیستمهای LPR اکنون به گزینههای ارزانتر و انعطافپذیرتری تبدیل شدهاند که امکان بهرهبرداری از دامنه وسیعتری از کاربردها را فراهم میکنند. همچنین، نامها و اختصارات مختلفی برای سیستمهایی که به نوعی معادل تشخیص پلاک خودرو هستند، به کار میرود، که شرح زیر است:
(ALPR) automatic license plate recognitionتشخیص خودکار پلاک
(ANPR) automatic number plate recognitionتشخیص خودکار پلاک
automatic vehicle identification (AVI)شناسایی خودکار خودرو
vehicle license plate recognition ، (VLPR)تشخیص پلاک خودرو
vehicle recognition identifier)VRI( شناسه تشخیص خودرو
car plate recognition)CPR( تشخیص پلاک خودرو
پلاک خوان خودرو car plate reader (car)، و غیره.

بخش هایی از سیستم lpr :1 ضبط پالک :2 الگوریتم نرم افزار :3 پایگاه داده یا اقدام
یک سیستم شناسایی پلاک خودرو (LPR) شامل یک یا چند دوربین است که تصاویر پلاکهای خودرو را ثبت میکند. این تصاویر سپس توسط نرمافزار مخصوص تجزیه و تحلیل و پردازش میشوند. در این فرآیند، نرمافزار LPR بهطور خودکار پلاکها را شناسایی و خوانده و اطلاعات آنها را به سرور راه دور ارسال میکند.
زمان: شماره پلاکهای شناسایی شده میتواند در یک پایگاه داده ذخیره شود تا در آینده مورد استفاده قرار گیرد.
اقدامات: به عنوان مثال، میتوان از این اطلاعات برای باز کردن یک دروازه استفاده کرد.
در شرایط ایده ال: سیستم LPR باید قادر باشد تمامی پلاکهای عبوری را شناسایی کرده و آنها را به درستی بخواند. هیچ الگوریتمی، حتی اگر بسیار پیچیده باشد، نمیتواند پلاکی را از روی تصویری که پلاک آن به وضوح قابل مشاهده نیست، شناسایی کند. برای تشخیص موفق پلاکها، دوربین باید به شیوهای خاص در محیط و تراز مناسب قرار گیرد. علاوه بر این، دوربینهای LPC به تنظیمات متفاوتی نسبت به سایر دوربینها نیاز دارند.
تنظیمات پیش فرض
دوربینهای معمولی برای خواندن پلاک مناسب نیستند و نیاز به تنظیمات خاصی دارند. این موضوع میتواند نصب را نسبتاً دشوار کند، مگر اینکه از دوربینهای اختصاصی LPR/LPC استفاده شود.
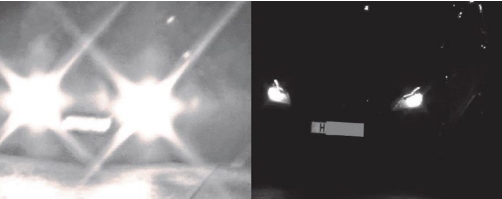
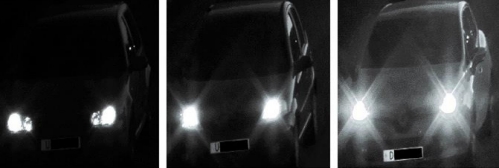
ضبط پلاک خودرو در شب. سمت چپ: استفاده از دوربینی که به اشتباه پیکربندی شده است. راست: با استفاده از اختصاصی دوربین LPR/LPC اکسیس.
دوربین های LPC/LPR
دوربینهای LPR/LPC اختصاصی Axis به منظور عملکرد در شرایط سخت ترافیکی طراحی شدهاند، اجزا و قطعات این دوربینها به گونهای انتخاب شدهاند که در برابر آب و هوای نامساعد، بادهای شدید و تغییرات دما مقاوم باشند، در دوربینهای LPR/LPC Axis، بهینهسازی تصویر به طور عمیقتری از طریق تنظیمات سرعت شاتر و بهره انجام میشود، برای این دوربینها، بخشهای پردازش تصویر به ویژه برای LPC بهطور مجدد پیکربندی شدهاند. تمامی جنبهها از جمله فیلتر نویز، کنترل بهره، فوکوس خودکار و سوئیچینگ روز و شب به دقت مورد بررسی قرار گرفته و در شرایط واقعی ترافیک در فضای باز آزمایش شدهاند.
دستیار ثبت شماره پلاک
طراحی شده تا به تنظیم و پیکربندی صحیح دوربین کمک کند، در حین تراز کردن AXIS دستیار ضبط پلاک یک ویژگی است که توسط دوربین، به طور خودکار بازخوردی به شما ارائه میدهد، این امکان به دلیل توانایی دوربین در اندازهگیری جهتگیری خود درمیدان گرانشی فراهم شده است. دستیار به طور مداوم زاویه عمودی دوربین، زاویه افقی و زاویه چرخش را به شما نمایش میدهد و درصورت نادرست بودن، با یک هشدار شما را مطلع میسازد.
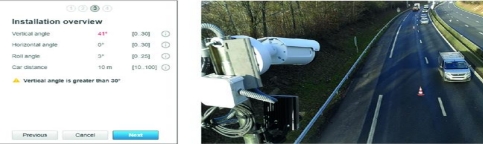
دستیار ضبط پلاک محور، فرآیند نصب را راهنمایی می کند و هشداری را نشان می دهد
تراکم پیکسل
برای اینکه عدد بهخوبی قابل تشخیص باشد، لازم است که یک پلاک بر روی تعداد کافی از پیکسلها در حسگر تصویر ایجاد شود تا بتواند هر یک از حروف و ارقام را شناسایی کند. همچنین، برای دستیابی به کنتراست مناسب بین خطوط سیاه و فضاهای سفید، حداقل دو پیکسل در کوچکترین ساختاری که در تصویر وجود دارد، ضروری است. به همین دلیل، برای یک پالک استاندارد به 74 پیکسل در عرض کامل پالک نیاز داریم، در حالی که دوربینهای LPR به 150 پیکسل احتیاج دارند.

یک پلاک استاندارد اروپایی باید حداقل 75 پیکسل را پوشش دهد تا پلاک خوانا باشه البته در دوربین lprبه 100 تا 150 پیکسل نیاز هست.
از منظر دوربین:
تعداد پیکسلهای پلاک خودرو به وضوح حسگر تصویر و میدان دید تصویر بستگی دارد.
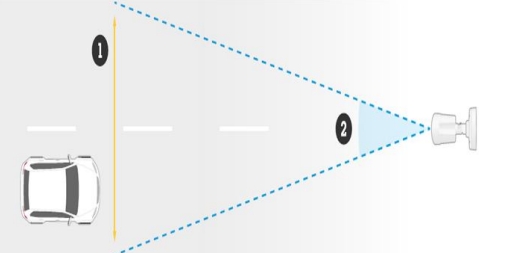
عرض صحنه (1) به میدان دید دوربین (2) بستگی دارد.
لنز وریفوکال و موتورایز را می توان بزرگنمایی کرد، که آزادی انتخاب میدان دید را می دهد پس بهترین لنز برای پلاک خوانی لنز موتوراز و وری فوکال با فاصله کانونی 6 به 22 میلی متر می تونه باشه.

تعداد پیکسل ها در عرض پلاک بستگی به وضوح دوربین و میزان آن دارد.
در این مثال یک دوربین با وضوح 1080*1920 پیکسل است
تصویر چپ: روی تصویر زوم و 1 لاین (عرض تصویر 4 متر) با 250 پیکسل تصویر پلاک ساخته شده است.
تصویر راست: روی تصویر کم تر زوم و 2 لاین شده (عرض 6.5 متر) با 154 پیکسل پلاک ساخته شده است.
نکته: پس هر چه قدر پیکسل سازنده پلاک رو با زوم تصویر بتونیم بالاتر ببریم پلاک خوانی بهتری داریم که البته میدان دید به اندازه سنسور و فاصله کانونی لنز دوربین بستگی دارد.
جدول اول میدان دید افقی توصیه شده را برای پوشش یک و دو خط در مسیرهای مختلف بیان می کند.
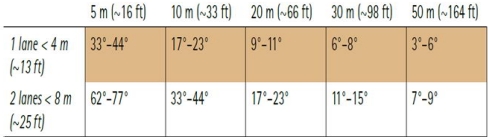
میدان دید افقی توصیه شده
جدول دوم حداقل وضوح سنسور توصیه شده برای پوشش یک و دو خط را فهرست می کند. توجه داشته باشید که این برای پلاک های استاندارد اروپایی است و پلاک های کوچکتر ممکن است نیاز به وضوح بالاتر باشد.

حداقل وضوح
وضوح بالا این ایراد را دارد که تجزیه و تحلیل هر تصویر زمان زیادی طول می کشد تا نرم افزار LPR تجزیه و تحلیل شود، این وقتی ترافیک زیاد است، خطر گم شدن برخی از صفحات را افزایش می دهد، هنگام اجرای مستقیم نرم افزار LPR بر روی یک دوربین توصیه می کنیم از دوربینی با وضوح 2 مگاپیکسل یا کمتر استفاده کنید و به جای رزولیشن بالاتر از چندین دوربین را برای پوشش بیشتر در نظر بگیرید.
*خطوط رزولوشن توصیه شده مندرج در دفترچه راهنمای نرم افزار LPR را نیز بررسی کنید.
نور IR
برای گرفتن پلاک در شب به نور مصنوعی نیاز است. معمولاً از نور مادون قرمز استفاده میشود، با چشم غیرمسلح قابل مشاهده نیست و راننده را کور نمی کند. بیشتر تراشه ها بازتابنده هستند و نور مادون قرمز ساطع می کنند، در هوای تاریک یا ابری، دید و کنتراست صفحه را می توان افزایش داد ال ای دی ها از نور مادون قرمز داخلی دوربین یا منبع مادون قرمزی که خارج از دوربین است استفاده کنید.
دسترسی IR
شدت نور با فاصله گرفتن از منبع نور کاهش می یابد و مربع می شود. برای یک شی منعکس کننده، مانند یک پلاک، این کار را انجام می دهد لازم است. IR این یک واقعیت است که برای هر دو برابر شدن فاصله بین منبع نور و جسم، افزایش چهار برابری در قدرت شیء همان دیدگاه را حفظ می کند، موجود، بستگی به همان نور دارد. IR بیشترین محدوده ممکن برای یک تنظیم خاص به توان با توجه به زمان شاتر کمتر مورد نیاز برای LPC، نور دوربین کمتری را از خود جمع آوری میکند، اما در تنظیمات پیش فرض، بازتاب IR بالای لنز باعث افزایش روشنایی می شود به طور کلی، در هنگام استفاده از دوربین، دسترسی IR مشخص شده حدود 50٪ کاهش می یابد.
منابع IR خارجی
اگر دسترسی IR با LED داخلی کافی نیست، یا اگر دوربین دارای LED داخلی IR نباشد، در این مورد می توان از منبع IR دوربین خارجی استفاده کرد. مخروط منبع نور IR باید با میدان دید دوربین همسطح باشد بزرگنمایی مربوطه مطابقت دارد نوارها از مواد بازتابنده ساخته شده اند، به این معنی که نور را مستقیماً به عقب منعکس می کنند از کجا می آید مهم نیست که نور از چه زاویه ای به صفحه می تابد، هنگام استفاده از منبع IR خارجی، نور مادون قرمز منعکس شده به منبع باز می گردد.
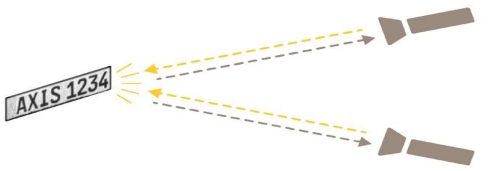
پلاک ها بازتاب دهنده های عقب هستند. آنها نور را به جایی که از آن آمده منعکس می کنند
به همین دلیل، منابع مادون قرمز خارجی باید در نزدیکی دوربین قرار گیرند تا نور منعکس شده به آن برسد. در واقع وقتی منبع IR از دوربین دور می شود روشنایی و کنتراست پلاک در تصویر دوربین به سرعت کاهش می یابد .
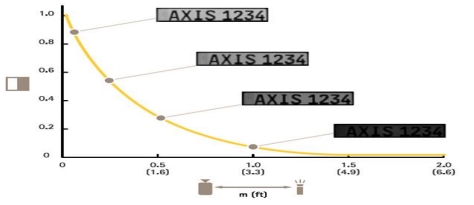
کنتراست نسبی یک پلاک در فاصله 10 متری، به عنوان تابعی از فاصله (عمود بر جاده) بین دوربین و منبع IR خارجی
منبع مادون قرمز باید به موازات دوربین قرار گیرد و اطمینان حاصل شود که نور به بخشی از دوربین باز می گردد به شدت می درخشد، اگر از نور مادون قرمز استفاده شود، تصاویر شب سیاه و سفید خواهند بود، مانند دوربین های پلاک خوان MileSight و
اگر از پروژکتور یا دوربین با نور وام لایت استفاده می کنید، تصویر رنگی می شود، برای بهره گیری از پروژکتور اعداد باید در زیر یا نزدیک دوربین نصب شوند تا نور را به دوربین بازتاب دهند، 50٪ خوانایی بهتر از طراحی خوب نور محیط ناشی می شود.
نصب و راه اندازی
نصب دوربین اغلب یک مرحله حیاتی است زیرا تنظیم مجدد یا جابجایی آن بعداً دشوار است. دستیار ضبط پلاک AXIS ابزاری است که برای کمک به نصب، تراز و تنظیم دقیق طراحی شده است.
برای یک صحنه ترافیکی خاص، می تواند زوایا و فواصل مربوطه را در زمان واقعی به شما نشان دهد، اگر تراز دوربین بهینه نیست هشدار دهید.
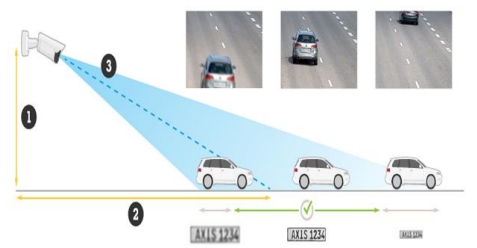
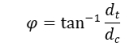
موقعیت دوربین
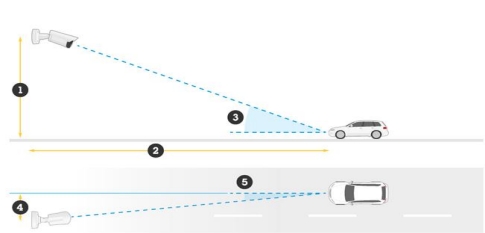
ارتفاع نصب (1) و فاصله گرفتن (2) زاویه عمودی بین دوربین و جهت حرکت ماشین(3) فاصله از مرکز جاده (4) زاویه افقی بین دوربین و جهت حرکت ماشین (5)
توصیه می شود برای مشاهده هر چه بهتر پلاک خودرو، زاویه بین دوربین و جهت حرکت خودرو را به حداقل برسانید شماره (5) در تصویر بالا
در حالت ایده آل، دوربین باید مستقیماً بالای وسیله نقلیه قرار گیرد، ارتفاع نصب 4.5 تا 5 متر بالاتر از نور، همچنین توصیه می شود جلوی ماشین بایستید تا دوربین در معرض نور شدید قرار نگیرد، از قرار دادن دوربین در نزدیکی سایر منابع نور قوی مانند چراغ های خیابان خودداری کنید، اگر رعایت نشود موارد ممکن است با عملکرد نوردهی خودکار تداخل داشته باشند و باعث تابش خیره کننده و انعکاس شوند.
تراز دوربین
دوربین باید رو به جاده باشد، به طوری که خط های مربوطه در مرکز تصویر باشد. البته تصویر با لنز موتورایز یا وری فوکال زوم می شود تا تعداد خطوط مورد نظر را پوشش دهد و به گونه ای تنظیم می شود که پلاک ماشین باید موازی با لبه تصویر باشد.

دوربین باید طوری تنظیم شود که پلاک خودرو موازی با لبه تصویر باشد.
فاصله بین دوربین و بخشی از جاده که آن را می گیرد، فاصله عکاسبرداری نامیده می شود، این فاصله باید با دقت انتخاب شود زیرا بر تصویر نهایی پلاک تأثیر می گذارد، در ادامه به موارد دیگری که بر روی تشخیص پلاک تاثیر گذار است خواهیم پرداخت:
انتخاب فاصله گرفتن
عمق میدان
دوربین باید به خوبی فوکوس کند تا پلاک ها واضح و خوانا باشندبا این حال بهترین قسمت تصویر واضح است و در قسمت های دیگر وضوح کاهش می یابد، در قسمتی که کل تصویر واضح است، عمق میدان یا DOPH می گویند.
عمق میدان به میزان فاصله نسبتاً از اجسام در یک تصویر که به طور نسبی واضح است اشاره دارد یعنی تا جایی که تمام قسمت های تصویر از نقطه نزدیک تا دور از نظر وضوح قابل قبول باشد، عمق میدان با تنظیمات دوربین مانند دیافراگم، فاصله کانونی لنز، فاصله فوکوس و زاویه دید تعیین می شود.
1: ارتفاع، 2: فاصله گرفتن یا فاصله کانونی،3: صفحه کانونی،4: عمق میدان.
محدوده اطراف صفحه کانونی را تعیین می کند که در آن تصویر هنوز به طور قابل قبولی واضح است، DOFرا می توان با کاهش اندازه دیافراگم عنبیه افزایش داد، این تنظیم عنبیه در دوربین Axis است به طور خودکار با سطح نور فعلی سازگار می شود و معمولاً نیازی به تغییر ندارد، کاهش دادن دیافراگم عنبیه باید با احتیاط کار شود زیرا عملکرد دوربین را در نور کم محدود می کند.
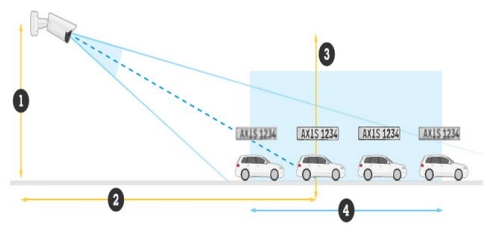
محدوده قابل تشخیص را می توان با عمق میدان وضوح محدود کرد، 1: ارتفاع، 2: فاصله گرفتن )فاصله کانونی)، 3: زاویه دید عمودی
محدوده قابل تشخیص، مسافتی است که در تصویر در امتداد جاده پلاک قابل مشاهده و خواندن است در حالت ایده آل، محدوده قابل تشخیص کل میدان دید دوربین است، اما نه همیشه برد قابل تشخیص را می توان با عمق میدان دوربین و وسایل نقلیه ای که دور هستند محدود کرد، شرایط آب و هوایی مانند برف، باران و مه می تواند دید دوربرد و محدوده قابل تشخیص را به شدت محدود کند.
در طول روز و در شرایط آب و هوایی خوب، محدوده قابل تشخیص با فواصل بیشتر افزایش می یابد وسایل نقلیه ای که با سرعت بالا حرکت می کنند باید از فاصله گرفتن طولانی استفاده شود تا زمان کافی برای گرفتن تصویر پلاک داشته باشد و قبل از خروج خودرو از میدان دید، پلاک خودرو را بخوانید.
فاصله توصیه شده
حداقل فاصله عکاسی برای سرعت های مختلف خودرو
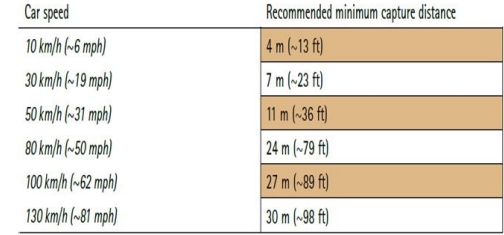
حداقل فاصله عکسبرداری توصیه شده به سرعت خودرو بستگی دارد. اعداد جدول بندی شده توسط زمان تشخیص تخمینی 0.2 ثانیه است، به این معنی که نرم افزار تجزیه و تحلیل LPR می تواند پنج فریم را تجزیه و تحلیل کند در هر ثانیه توجه داشته باشید که تعداد فریم های تحلیل شده در ثانیه ممکن است بین آنها متفاوت باشد. همچنین به نرم افزارهای مختلف LPR و پردازنده های مختلف به وضوح تصاویر بستگی دارد. این جدول فقط یک راهنما است ماکزیمم برد اغلب می تواند به دلیل عدم پاسخگویی دوربین به IR در شب محدود شود، که نیاز به IR خارجی قوی تر دارد تا تصویر را بهبود ببخشند.
تنظیمات دوربین
هنگام ضبط پلاک، تنظیمات دوربین تفاوت زیادی در تصاویر ایجاد می کند، دوربین های اکسیس lprبا تنظیمات پیشفرض مناسب تحویل داده میشود و به حداقل پیکربندی نیاز دارد، اما برای یک دوربین دیگر باید تنظیمات دوربین را در محیط تغییر دهیم.
حداکثر زمان شاتر
اگر زمان شاتر دوربین به درستی تنظیم نشده باشد، خودرویی که در تصویر رانندگی می کند تار می شود حداکثر زمان شاتر به سطح دوربین و سرعت خودرو بستگی دارد.

خودرویی که با سرعت بالا حرکت می کند با زمان شاتر 30/1 ثانیه تصویر شده است.
خودروهایی که مستقیماً به دوربین نزدیک می شوند در تصویر به صورت افقی حرکت نمی کنند بزرگتر و نزدیکتر می شود، این تأثیر معمولاً ناچیز است. اما به محض ایجاد زاویه بین دوربین و جهت حرکت، خودرو به صورت عرضی در تصویر با سرعتی حرکت می کند که باعث تاری از زاویه سرعت عرضی می شود در زمان های شاتر معمولی در حدود 30/1 ثانیه می شود، بنابراین حداکثر زمان شاتر باید محدود شود.
زمان سرعت شاتر را بسته به زاویه بین دوربین و جهت حرکت ماشین و سرعت وسایل نقلیه را می توان تخمین زد 1 میلی ثانیه = 1000/1 ثانیه.
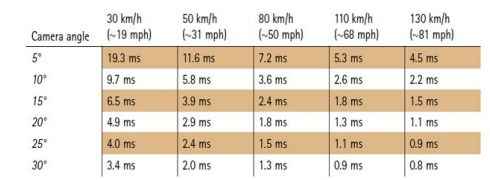
حداکثر زمان شاتر توصیه شده بسته به زاویه دوربین و سرعت خودرو
1 میلی ثانیه = 1000/1 ثانیه
توجه داشته باشید که دوربین نور بیشتری را با زمان شاتر طولانی تر جمع آوری میکند که باعث افزایش برد IR میشود. مثال؛ با نصب دوربین در زاویه 5 درجه به جای زاویه 20 درجه، می توان زمان شاتر را افزایش داد.
افزایش حداکثر بهره GAIN
از آنجایی که پلاک خودرو از مواد بازتابنده ساخته شده است، هنگام قرار گرفتن در معرض شدید نور IR به خوبی می درخشد اما محیط اطراف بسیار تاریک تر خواهد بود زیرا اشیاء دیگر نور بسیار کمتری را منعکس می کنند. نتیجه می تواند پلاک خودرو بیش از حد نوردهی کند و خواندن آن غیرممکن است. ساده ترین راه برای جلوگیری از نوردهی بیش از حد پلاک خودرو، محدود کردن حداکثر بهره gainدوربین است. دقیقا نحوه تنظیم حداکثر بهره به فاصله تا وسایل نقلیه و به شدت نور IR موجود بستگی دارد.
تنظیم gain در دوربینهای اکسیس چیزی بین 9 دسی بل و 21 دسی بل نتایج معقولی در هنگام استفاده از آن را می دهد.
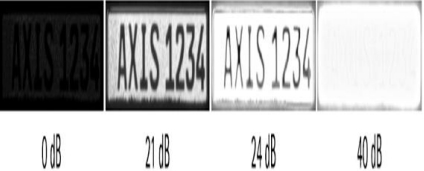
تنظیم حداکثر بهره تعیین می کند که چگونه پلاک خودرو در شب در معرض دید قرار می گیرد.
WDRمحدوده دینامیکی گسترده
محدوده دینامیکی گسترده WDR شامل تکنیک های مختلفی برای افزایش دامنه دینامیکی یک تصویر است WDR برای نشان دادن جزئیاتی در تصویر که در سایه ها هستند یا در اثر نور شدید تصویر "کور" می شود به کار می رود WDR در تصاویر وسایل نقلیه متحرک، می تواند باعث ایجاد مصنوعات حرکتی شود پس برای هر چه بهتر پالک خوانی بهتر است همیشه wdr خاموش باشد.
TONE MAPING و کنتراست
TONE MAPING برای بهبود جزئیات در قسمت های تاریک تصویر استفاده می شود. در صورت استفاده نادرست می تواند تابش خیره کننده از چراغ های جلو و نویز را افزایش دهد توصیه می کنیم هنگام دوربین میزان TONE MAPING را کاهش دهید تنظیم کنتراست حدود ،٪60 در حالی که TONE MAPING را به ٪20 کاهش می دهد. از تنظیم کنتراست در دوربین می توان برای تیره کردن پس زمینه تصویر در شب استفاده کرد. در حالی که سفیدی پلاک را بیرون می آورد اما اگر خیلی بالا تنظیم شود ممکن است پلاک تاریک شود و به جای آن چراغ های جلوی خودروها را بیرون بیاورید. توصیه می کنیم کنتراست را با دقت افزایش دهید.
TONE MAPING و کنتراست محلی، تعادل بین روشنایی و کنتراست روی پلاک خودرو، نویز و
تابش بیش از حد در تصویر 1
نرم افزار تشخیص پلاک
پس از ضبط جریان تصویری پلاک، یک نرم افزار آنالیز تخصصی برای استخراج پلاک ها مورد نیاز است با این حال، اجرای نرم افزار LPR بر روی یک سرور راه دور می تواند قدرت پردازش زیادی را ارائه دهد، اما پهنای باند
به شبکه های بیشتری نیاز دارد، اجرای مستقیم نرم افزار LPR روی دوربین به این معنی است که فقط حروف و اعداد پلاک خودرو باید در آن وجود داشته باشد از دوربین تا سرور مرکزی (اگرچه خروجی اغلب شامل یک عکس فوری از پلاک است) این مورد نیاز پهنای باند شبکه را به حداقل می رساند.
زاویه بین دوربین و ماشین
مجموع زاویه بین دوربین و جهت حرکت خودرو را می توان با فرمول های زیر به دست آورد:
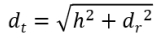
که در آن h ارتفاع نصب دوربین بر حسب متر و dr مسافت جاده بر حسب متر است.
زاویه بین دوربین و ماشین:
که در آن dt فاصله عرضی بر حسب متر بین دوربین و جاده و dc فاصله عکسبرداری است در متر
1 ارتفاع نصب (h) ، 2 فاصله گرفتن(dc) و 4 فاصله جاده(dr) است.
توصیه می کنیم زاویه کلی را زیر 30 درجه نگه دارید. در جداول زیر زاویه بین دوربین و ماشین برای برخی از ارتفاعات نصب معمولی، فواصل جاده و فاصله گرفتن محاسبه می شود.
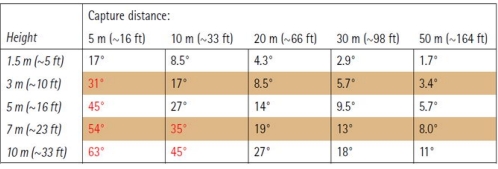
این جدول زوایای دوربین در فاصله جاده 0 متر، متن قرمز نشان می دهد که زاویه برای LPC خیلی بزرگ است.
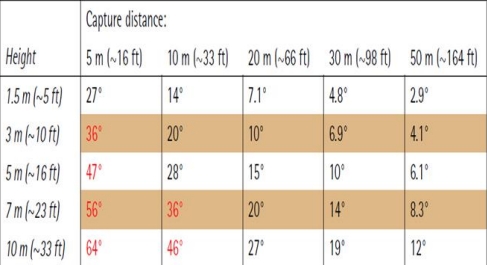
زوایای دوربین در فاصله جاده 2 متر (~7 فوت)، متن قرمز نشان می دهد که زاویه برای LPC
خیلی بزرگ است.
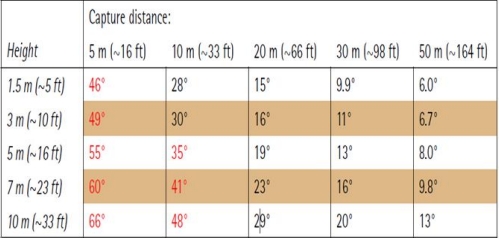
زاویه دوربین در فاصله جاده 5 متر (~16 فوت)، متن قرمز نشان می دهد که زاویه برای LPC خیلی بزرگ است.
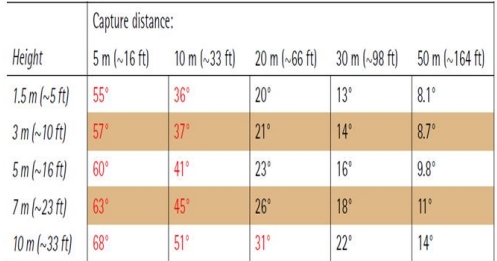
زوایای دوربین در فاصله جاده 7 متر (~23 فوت)، متن قرمز نشان می دهد که زاویه برای LPC
خیلی بزرگ است.
ختم کلام
درسته که این فایل برای یکی از حرفه ای ترین دوربین های مداربسته با برند اکسیس تهیه شده ولی ما با رعایت این نکات با دوربین های پالکخوان معمولی هم می تونیم پالک خوانی خیلی بهتری داشته باشیم.